|
|
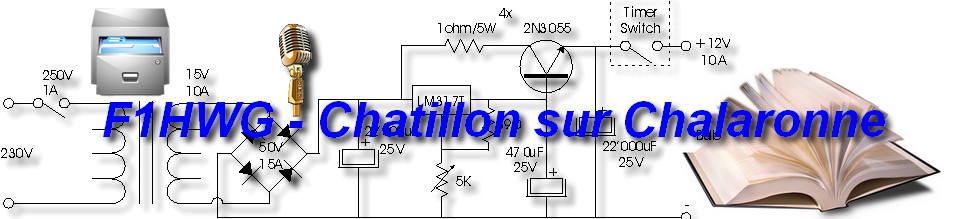
Pour une vision du système en fonctionnement...
Vous pouvez voir dans un premier temps une vitesse rapide, puis arrivé à un ROS de 1.5 à 1.8, le moteur passe en vitesse lente, ensuite le système recherche la position optimum du meilleur réglage qui doit se situer à un ROS d'environ 1.1 à 1.0 Et le système s'arrête et autorise la commutation en émission (seulement si le ROS est détecté à une valeur < 1.2) |
Météo
Calendrier
Préférences
|
 Retour à l'Accueil
Retour à l'Accueil Projets
Projets
 ]
] 10 membres
10 membres
 Haut
Haut

